Sergey Anisimov, a 6th-year student of the Faculty of Biology and Medicine at Siberian State Medical University, majoring in "Medical Cybernetics," has developed an exoskeleton for the rehabilitation of patients with impaired fine motor skills after a stroke. The device has 15 degrees of freedom - more than existing analogues (usually up to 11), which allows for more accurate reproduction of natural hand movements.
The technology is based on robotic mechanotherapy - a method that has proven effective in restoring motor functions. However, unlike traditional mechanical simulators, Anisimov's exoskeleton uses the "Neuro-kinesis" system developed at the Scientific and Technological Center "Digital Medicine and Cyberphysics." It includes a camera that reads the movements of the healthy hand and transmits the data to the exoskeleton, forcing the affected hand to repeat them. This is the principle of mirror therapy, but without a physical mirror - instead, computer vision and mechanics work.
The problem of post-stroke fine motor impairments, which is incredibly acute, prompted me to develop the exoskeleton. In Russia, only 43% of patients who have suffered a stroke return to work fully, and 44% of survivors completely cease working. The reason for this includes impaired fine motor skills, which significantly limit patients' ability to self-care and reduce their quality of life. In addition, this problem is personal to me, as my grandmother suffered a stroke in 2020.
The exoskeleton will include five modules (one for each finger), each of which will be able to:
- flex and extend the phalanges
- move fingers sideways at the level of the palm
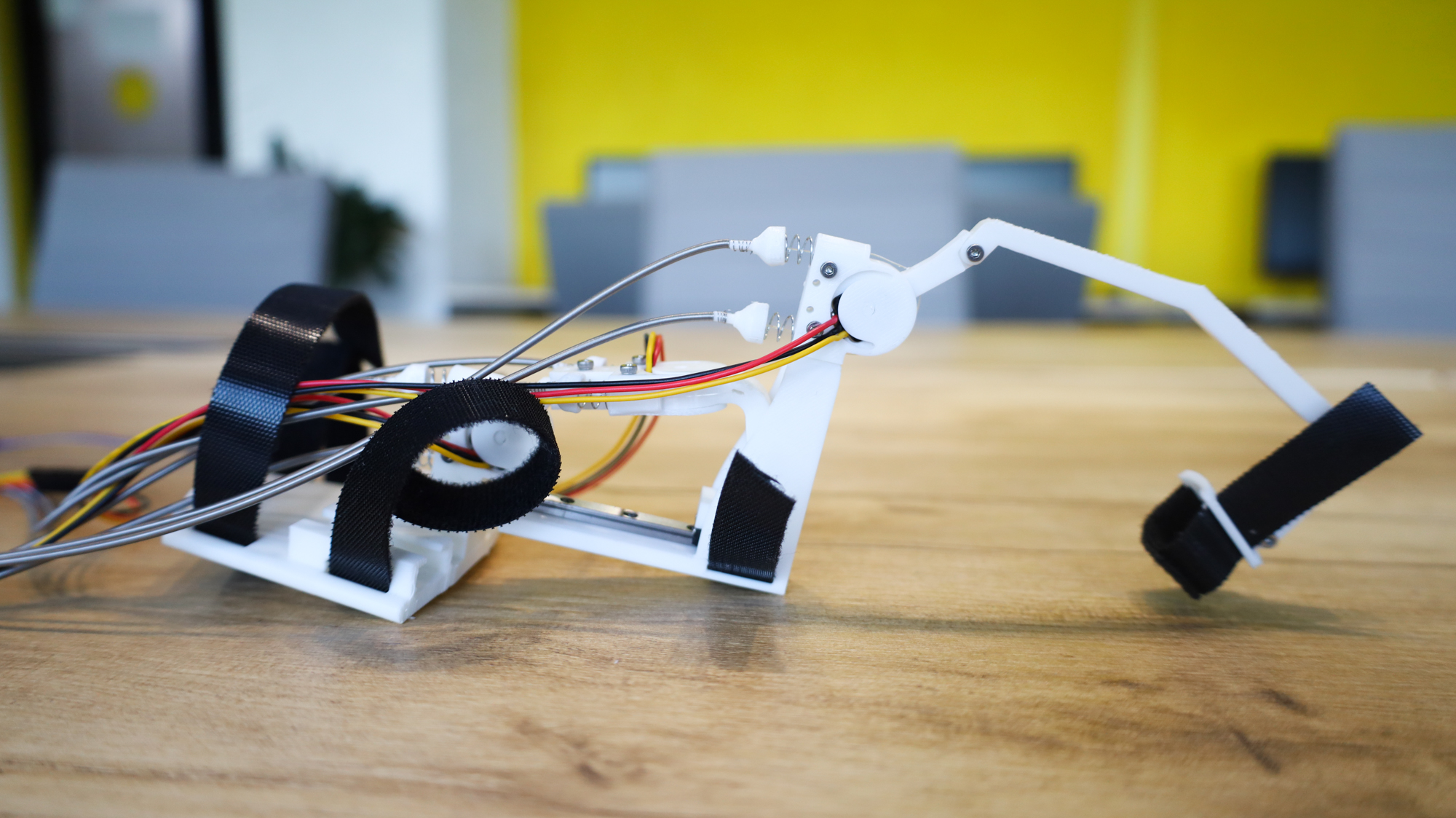
Control is carried out through servomotors and cables, and sensors track the angle of flexion. The materials for the exoskeleton were selected based on the principle of compatibility with the human body and created using three-dimensional printing.
A prototype for one finger is now ready, and modules for the rest are in development. After testing, the device is planned to be certified as a medical device and put into production for clinics. For individual use, the exoskeleton will be as simple as possible and adapted for people without medical education. At the same time, a more complex version with professional software will be created for medical institutions and rehabilitation centers. This will allow doctors and specialists to more effectively configure and control the recovery process. In the future, the technology will be adapted for other neurological pathologies.
Read more related materials:
Orthosis for hand rehabilitation after stroke was developed by a student of RTU MIREA
Комментарии