Ingenieros del Instituto de Aviación de Moscú desarrollaron una tecnología de compensación del retraso de señales en el control teleoperacional de sistemas aéreos no tripulados. Esta solución permite controlar drones y otros aparatos voladores con alta precisión, incluso con un retraso de la señal de hasta dos segundos, lo cual es especialmente crítico en condiciones meteorológicas complejas o en caso de fallos en el pilotaje principal.
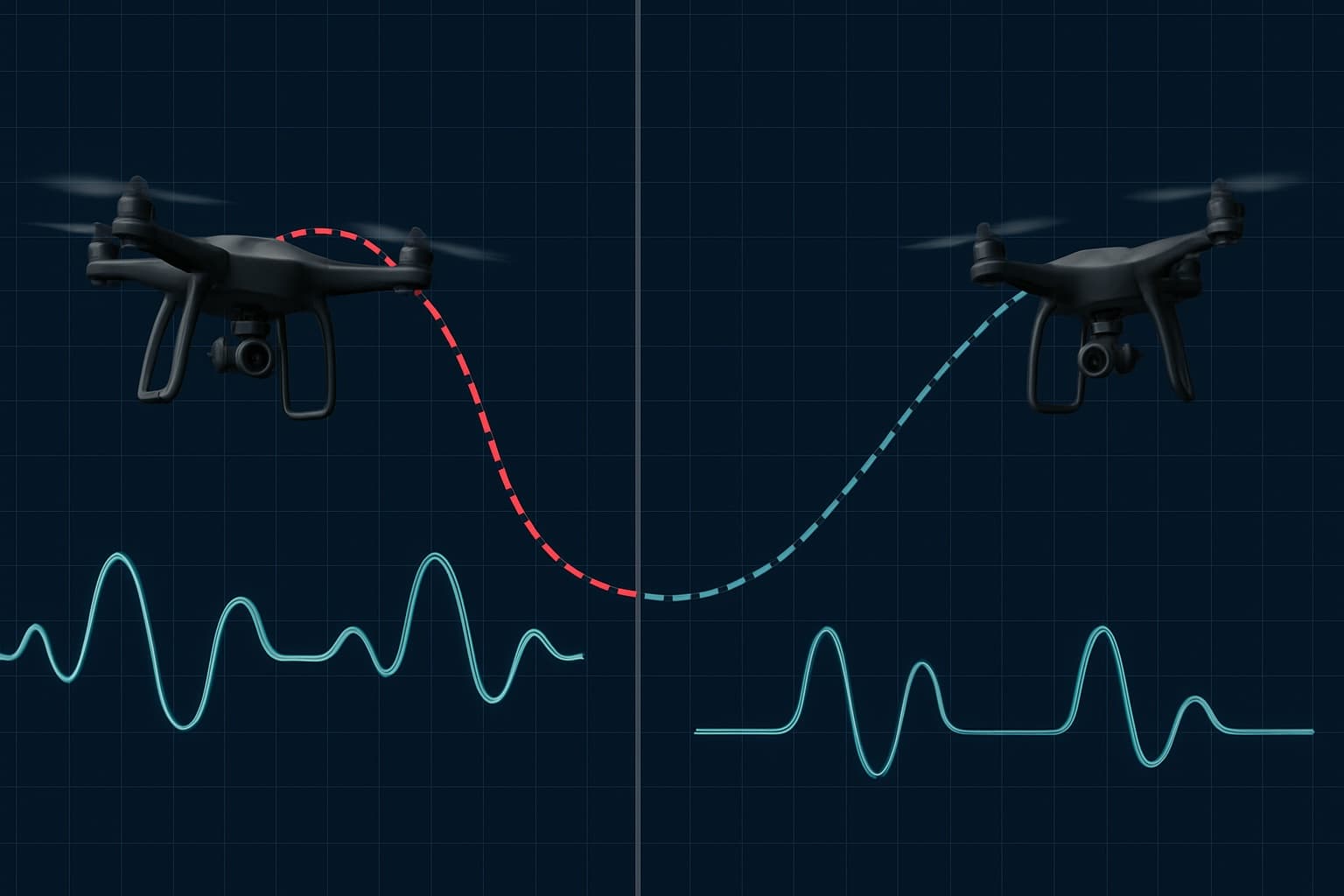
La tecnología se basa en un sistema en tiempo real que incluye la predicción multicapa de la trayectoria de vuelo y la corrección dinámica de los parámetros mostrados. Se adapta a tipos específicos de aeronaves y tiene en cuenta las características psicofisiológicas del operador, optimizando su interacción con el sistema.
Anteriormente, algoritmos similares se utilizaban en el control de naves espaciales, donde el retraso de la señal superaba un segundo y hacía prácticamente imposible el acoplamiento manual. El desarrollo fue perfeccionado y adaptado a la aviación no tripulada, donde incluso un retraso mínimo afecta significativamente la precisión del control.
El nuevo sistema ya se utiliza en proyectos de control de aviones de transporte pesados y drones, garantizando un aterrizaje seguro en caso de fallo del sistema principal. La tecnología ha sido desarrollada íntegramente en Rusia y es un paso importante hacia el control de alta precisión e independiente de las importaciones de equipos de aviación en tiempo real.
Lea también los siguientes materiales:
En Rusia presentarán un nuevo controlador de vuelo ruso para drones
En Rusia implementaron una tecnología para controlar un dron a través de un satélite