Las astronautas Anna Kikina y Dmitri Petelin participaron en la prueba del robot antropomórfico con plataforma móvil en el marco de la investigación científica «Sozvezdie - LMO», que se lleva a cabo en el Centro de Entrenamiento de Cosmonautas (TsPK) desde hace más de 10 años. El compañero de los astronautas ahora es el robot ruso Marfa.
Marfa — también conocido como robot antropomórfico móvil, que funciona de forma autónoma — es un desarrollo de «NPO «Técnica Androide», donde ya han creado varias máquinas de este tipo relacionadas con la conquista y exploración del espacio. En particular, este mismo equipo creó el robot Fiódor, que en agosto de 2019 se convirtió en el primer robot-astronauta del mundo en completar un ciclo completo de vuelo al espacio. Cumplió el programa científico previsto y regresó a la Tierra sin problemas.
Los astronautas Serguéi Prokópiev, Anna Kikina y Dmitri Petelin, con la ayuda de un dispositivo de control de tipo copia (ZUKT) y un casco de realidad virtual, controlaron entonces las «manos» de Fiódor durante los experimentos en la Tierra. Los especialistas tomaron lecturas de fondo de los astronautas antes y después de su vuelo a la ISS para identificar los cambios que se producen en el trabajo de los operadores-astronautas en función de los cambios en las condiciones del entorno.
Marfa recibió algunos principios de control de su predecesor, pero su funcionalidad se ha ampliado significativamente. En particular, el robot puede recoger tierra y realizar otras tareas, levantar objetos de hasta 5 kg. Estas habilidades podrían ser útiles en la Luna. Por ahora, sin carga, Marfa aguanta solo dos horas y media, pero en el futuro planean crear fuentes de energía para el robot que aseguren su funcionamiento las 24 horas del día.
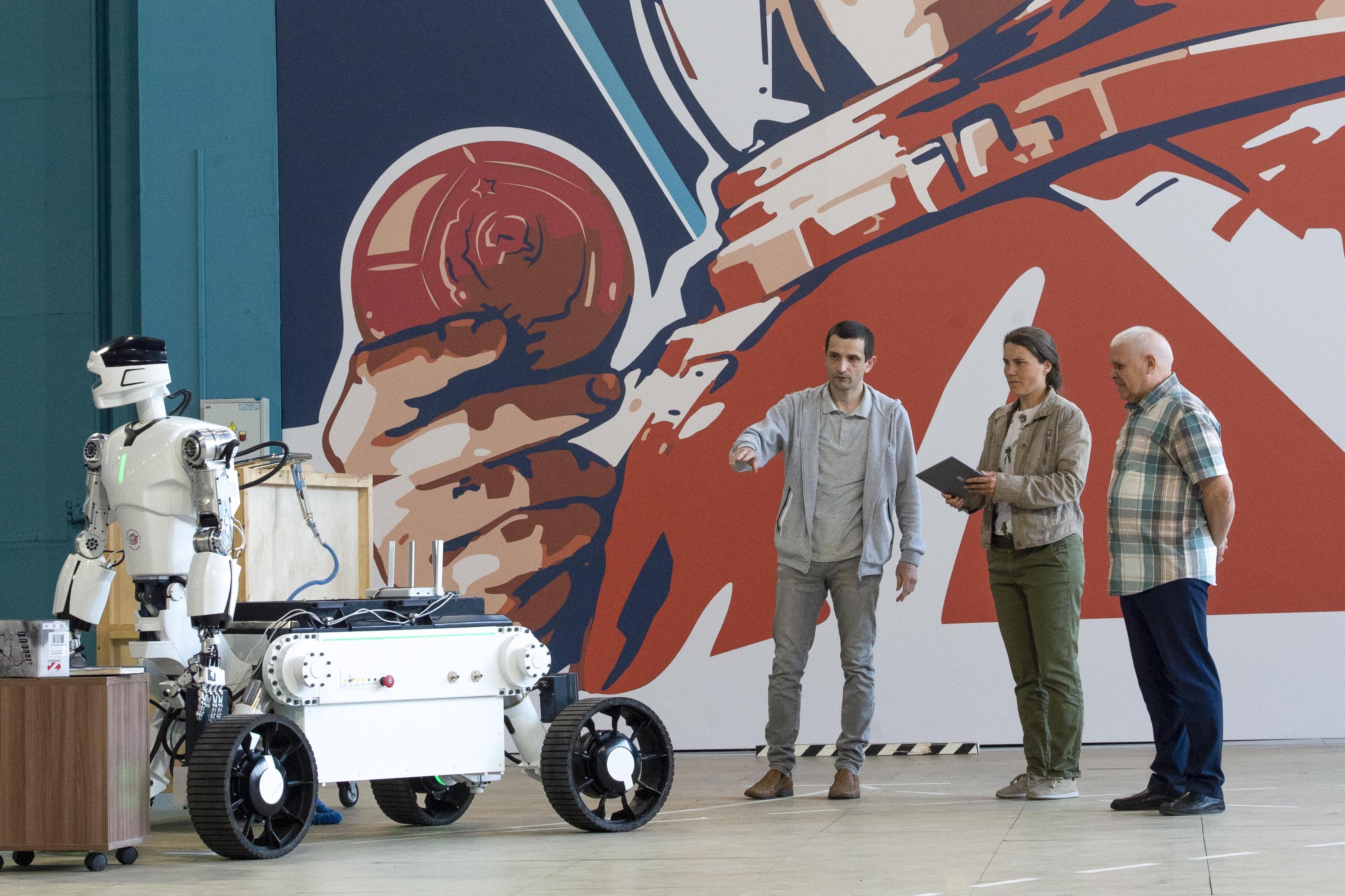
Marfa tiene varios modos de control. El robot puede actuar automáticamente, pero en caso de situaciones de emergencia, el astronauta lo controla manualmente. Para ello, el operador debe ponerse el ZUKT y trabajar con una tableta. Además, existe un modo de control supervisorio: es decir, Marfa se acerca al objeto de forma autónoma según un programa preestablecido, reconoce (en el campo de pruebas) botones o interruptores y los pulsa, realizando determinadas acciones. Además, como corresponde a un ser antropomórfico, el robot reacciona a la voz: al recibir una orden, va a ejecutarla.
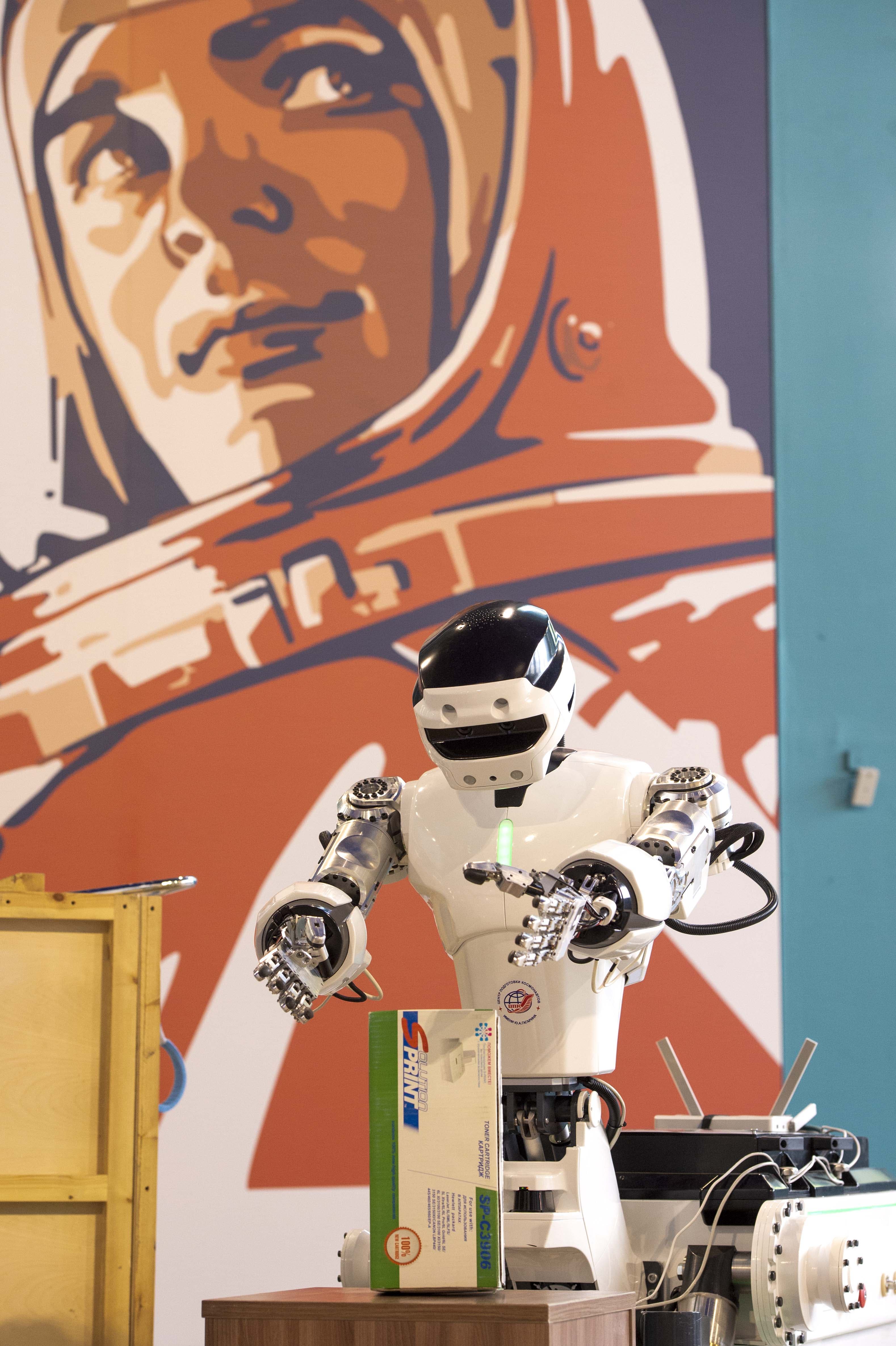
Durante el experimento, Marfa debía acercarse al panel funcional para realizar manipulaciones con los órganos de control, recoger una imitación de equipo científico, colocarla en la plataforma de carga y transportarla a un punto determinado. Además, el robot debía desenganchar un mosquetón del soporte. Trabajaron dos operadores: uno controlaba la plataforma móvil y el otro, a través del dispositivo de control de tipo copia, directamente el robot.

Según el TsPK im. Yu.A. Gagarin, al controlar a Marfa con la ayuda del ZUKT, surge una descoordinación en las acciones entre las «manos» del robot y el exoesqueleto en el que trabajan los operadores-astronautas. El caso es que cada persona tiene indicadores físicos individuales, por ejemplo, la longitud del brazo, el tamaño del agarre, mientras que el androide tiene estos indicadores invariables. Las estudiantes de tercer año del MAI, Victoria Epíjina y Alexandra Ivánova, están investigando las descoordinaciones. Sus cálculos, entre otras cosas, sentarán las bases de las recomendaciones para los desarrolladores del robot. También se tendrán en cuenta las recomendaciones de los astronautas.
Leer materiales sobre el tema:
Resistente a la radiación, controlado desde la Tierra: Rusia desarrolla un «Teledroide» espacial
Probado el robot-lunojod antropomórfico de Magnitogorsk
En Rusia enviaron por primera vez un perro robot a una mina
Комментарии