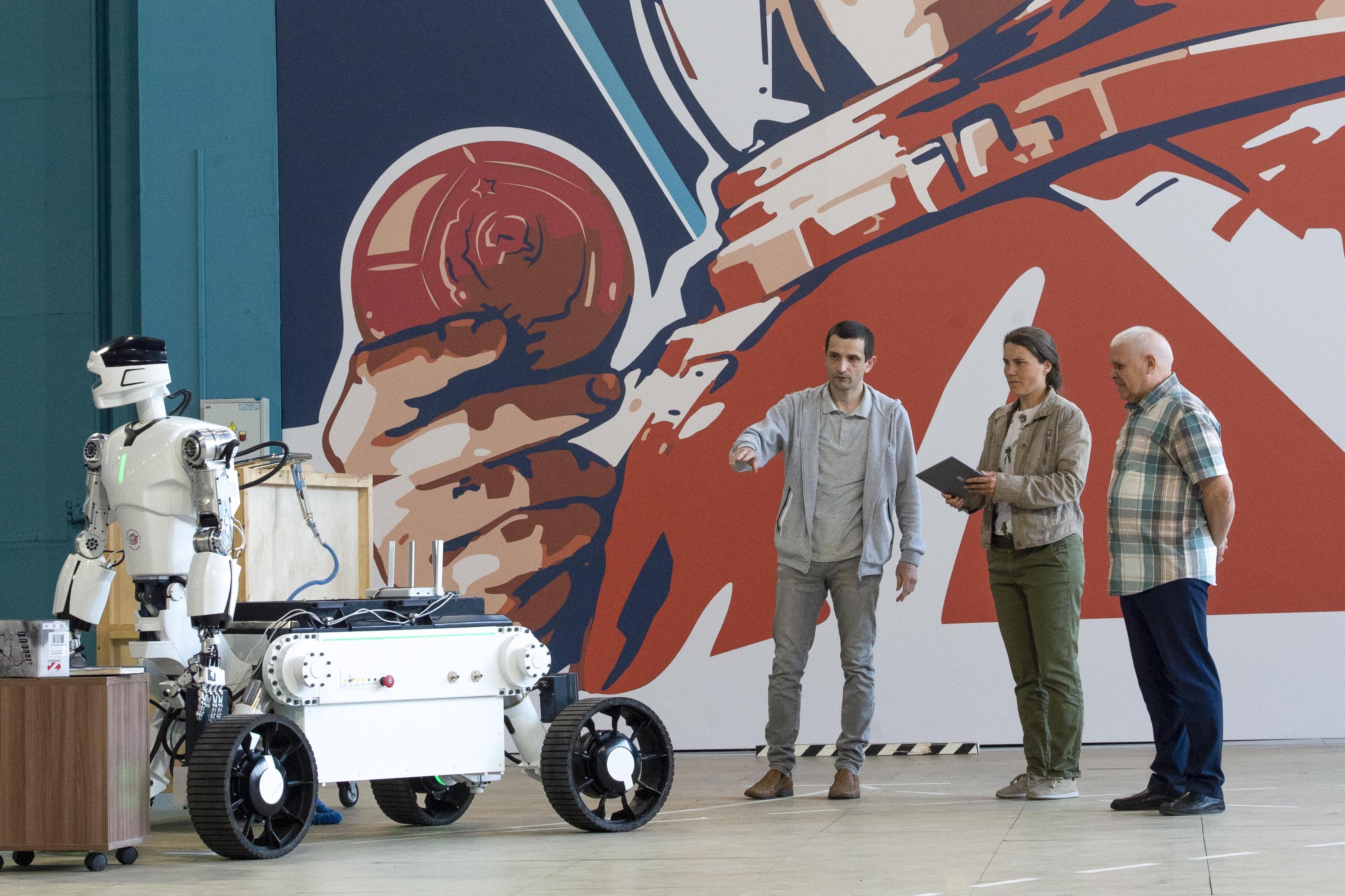
Космонавты Анна Кикина и Дмитрий Петелин приняли участие в апробации антропоморфного робота с мобильной платформой в рамках НИР «Созвездие - ЛМО», которая уже более 10 лет проходит в ЦПК. Напарником космонавтов сейчас выступает отечественный робот Марфа.
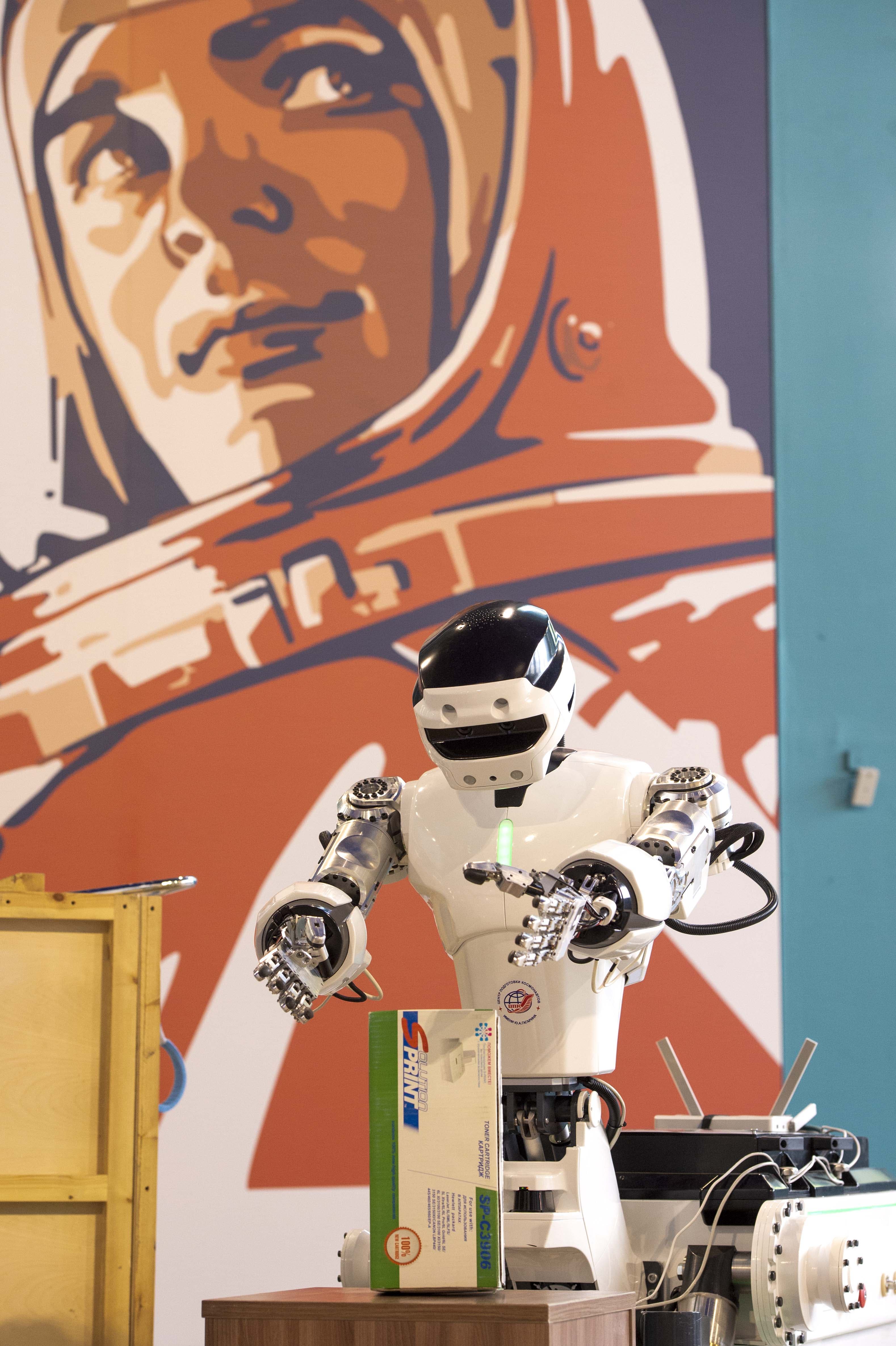
Марфа — она же мобильный антропоморфный робот, функционирующий автономно — разработка «НПО «Андроидная техника», где уже создали не одну такую машину, связанную с покорением и освоением космоса. В частности, эта же команда создала робота Фёдора, который в августе 2019 года стал первым в мире роботом-космонавтом, совершившим полный цикл полета в космос. Он выполнил запланированную научную программу и благополучно вернулся на Землю.
Космонавты Сергей Прокопьев, Анна Кикина и Дмитрий Петелин с помощью задающего устройства копирующего типа (ЗУКТ) и шлема виртуальной реальности тогда управляли «руками» Фёдора во время экспериментов на Земле. Специалисты снимали фоновые показания у космонавтов до и после их полёта на МКС, чтобы выявить изменения, которые происходят в работе операторов-космонавтов в зависимости то изменения условий вокруг.
Марфа от предшественника получила некоторые принципы управления, но её функционал значительно расширен. В частности, робот может собирать грунт и выполнять другие задачи, поднимать объекты весом до 5 кг. Эти навыки смогут пригодиться на Луне. Пока без зарядки Марфа держится всего два с половиной часа, но в будущем для робота планируют создать источники энергии, обеспечивающие круглосуточную его работу.
У Марфы есть несколько режимов управления. Робот может действовать автоматически, но в случае нештатных ситуаций космонавт управляет им вручную. Для этого оператору необходимо надеть ЗУКТ и работать с помощью планшета. Кроме того, существует супервизорный режим управления: то есть, Марфа самостоятельно подъезжает к объекту по заранее заданной программе, распознаёт (на опытной площадке) кнопки или тумблеры и нажимает на них, выполняя определённые действия. Также, как и положено антропоморфному существу, робот реагирует на голос: получив команду, он едет её выполнять.
Во время проведения эксперимента Марфа должна была подъехать к функциональной панели для выполнения манипуляций с органами управления, забрать имитацию научной аппаратуры, разместить на грузовой площадке и перевезти в заданную точку. Кроме того, робот должен был отстегнуть от стенда карабин. Работали два оператора: один управлял мобильной платформой, другой через устройство копирующего типа уже непосредственно роботом.

По данным ЦПК им. Ю.А. Гагарина, при управлении Марфой с помощью ЗУКТ возникает рассогласование в действиях между «руками» робота и экзоскелетом, в котором работают операторы-космонавты. Дело в том, что у каждого человека есть индивидуальные физические показатели, например, длина руки, размер хвата, а у андроида такие показатели неизменны. Исследованием рассогласований занимаются практиканты МАИ, студентки третьего курса Виктория Епихина и Александра Иванова. Их расчёты, в том числе, лягут в основу рекомендаций для разработчиков робота. Учтут и рекомендации космонавтов.
Читать материалы по теме:
Устойчив к радиации, управляется с Земли — Россия разрабатывает космического «Теледроида»
Испытан антропоморфный робот-луноход из Магнитогорска
В России впервые отправили в шахту робособаку
Комментарии