Specialists from the Moscow Institute of Physics and Technology (MIPT) have developed a unique kinematic scheme for an anthropomorphic robot that provides more natural and energy-efficient movements. Unlike traditional designs, where the motors are distributed along the entire length of the legs, the new system transfers the drives to the upper part of the limbs, significantly reducing the mass of the lower limbs and improving dynamics.
As explained by Roman Gorbachev, Head of the Laboratory of Wave Processes and Control Systems at MIPT, engineers used digital modeling to create a new mechanism. Special attention is paid to the design of the foot and ankle: they are made of carbon fiber and duralumin alloys using 3D printing. This allows the robot not only to walk and jump, but also exceeds the degrees of freedom of movement characteristic of the human body.
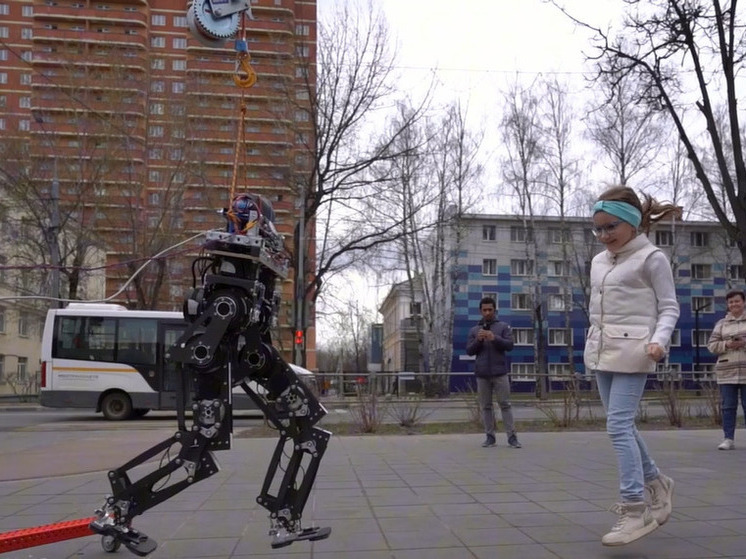
We are still in the development process, but our legs can already walk, accelerate quickly, bend their knees and jump, maintaining balance upon landing. According to our information, this is the first anthropomorphic robot developed in the Russian Federation capable of jumping dynamically.
Work on improving the robot control algorithms continues. Researchers will soon present an updated version of the upper part of the robot: torso, arms, and object interaction system.
Read more materials on the topic:
MaxBionic presented models of bionic hands MeHandA and MeHandB on its own software
Комментарии