В России разрабатывают проект морской мобильной робототехнической системы, которая сможет работать в дистанционно-управляемом и в автономном режиме.
Разработка «Невского ПКБ», входящего в Объединенную судостроительную корпорацию, объединяет в себе сразу несколько систем: от беспилотников до безэкипажных катеров и крупных многофункциональных надводных платформ. Все они будут работать на одном ПО российской разработки.

По информации Telegram-канала «Беспилот» техническую и исследовательскую часть проекта уже завершили – ее провели с 2019 по 2022 годы. Теперь «Невский ПКБ» ведет работу по изготовлению первого образца платформы и ее содержимого, ее хотят заверить к 2026 году.
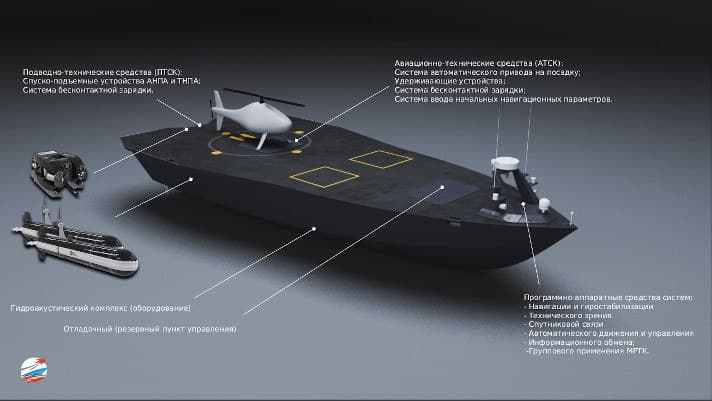
Но рендеры уже готовы и можно представить приблизительный вид платформы и ее объектов.

Отмечается, что безэкипажные катера и суда за счет большой модульности целевых нагрузок смогут выполнять широкий спектр задач.

Будут ли задачи исключительно гражданскими или же в них будет и военный компонент, не уточняется.

Кроме того, будущие платформы будут содержать надводный и подводный многофункциональные испытательные стенды.
Комментарии